SPI 通信原理
1. SPI 引脚介绍
下面是典型的单主从机模式的 SPI 示意图:
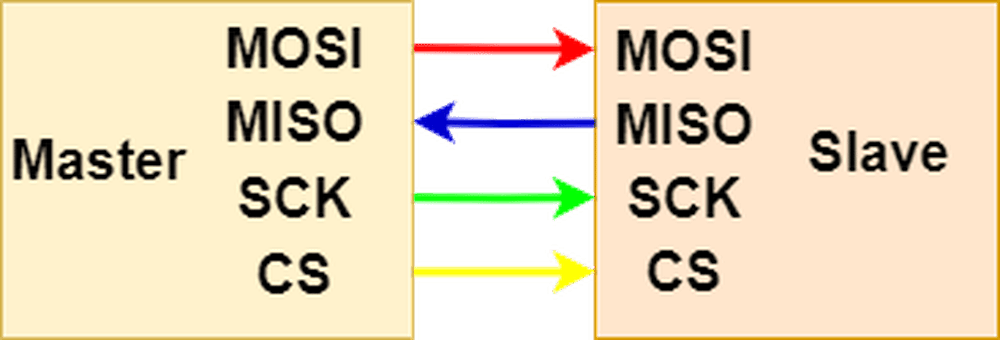
- MOSI(Master In Slave Out)——用于主机向从机发送数据。
- MISO(Master In Slave Out)——用于从机向主机发送数据。
- SCK(Serial Clock)——用于同步主从机的时钟频率。
- CS(Chip Select)——也称 SS(Slave Select),用于主机选择需要通信的从机。
2. CPOL 和 CPHA
前面讲到,SPI 的通信协议有着灵活的变种,这个变化主要是在时钟线上。即CPOL(Clock Polarity)和CPHA(Clock Phase),也就是时钟极性和时钟相位。
CPOL 简单来说,就是时钟是在高电平时空闲还是在低电平时空闲。如果 CPOL = 0,则先出现上升沿,再出现下降沿;如果 CPOL = 1,先出现下降沿,再出现上升沿。大部分设备 CPOL = 0。
CPHA 简单来说,就是数据是否在时钟信号的上升沿或下降沿移入或移出。如果 CPHA=0,MOSI 和 MISO 在时钟线的上升沿读取数据,下降沿改变数据;如果 CPHA=1,MOSI 和 MISO 在时钟线的下降沿读取数据,上升沿改变数据。大部分设备 CPHA = 0。
根据 CPOL 和 CPHA 的不同,SPI 通信可以分为以下四类:
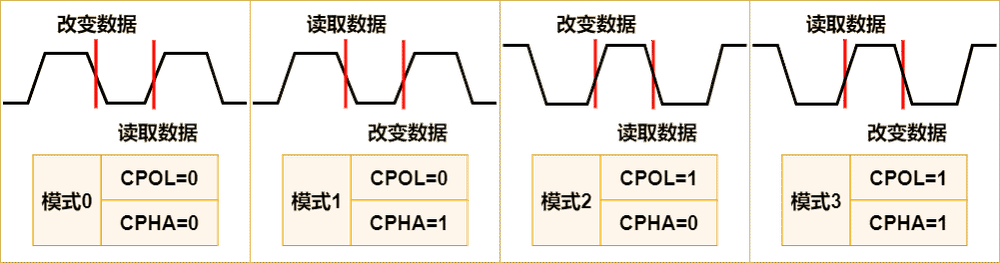
通常情况下,SPI 的通信模式为模式 0。
3. SPI 的通信过程
SPI 虽然不像 UART 那样,没有开始位和结束位;但是和 I2C 相似,有开始信号和结束信号。
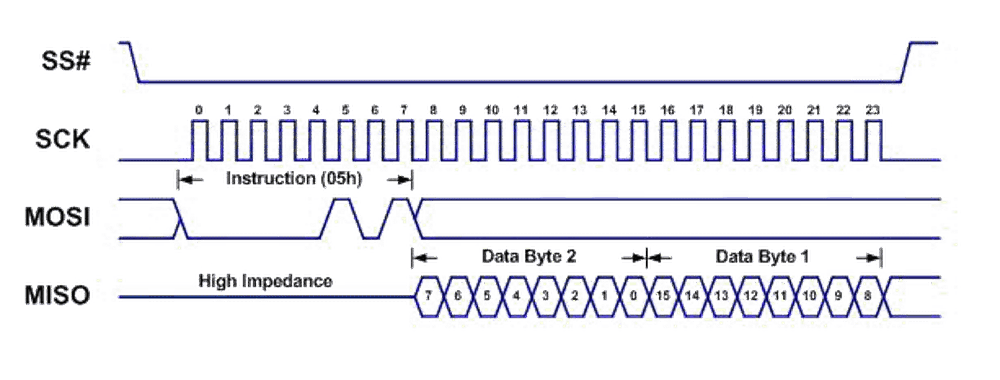
开始信号,主机拉低 CS,表示通信开始。
结束信号,主机拉高 CS,表示通信结束。
一般在通信过程中,MOSI 和 MISO 可以不间断地传输数据,在这之间没有校验信息,通常都是高位在前,低位在后。
下面是模式 0 的 SPI 通信时域图:
4. SPI 的优缺点
SPI 通信的优点:
- 没有开始位和结束位,可以连续发送数据
- 没有复杂的设备地址,取而代之的是 CS
- MOSI 和 MISO 可以让设备同时收发送数据
- 传输速度快,正常都可以达到 10MHz 甚至更高
SPI 通信的缺点:
- 四根线,有的设备还有 D/C 线,RST 线等,接线相对复杂
- 无 ACK 验证信息是否传输成功
- 无校验信息
- 只能有一个主机
5. Arduino 的 SPI 库
Arduino 的官方 SPI 库是SPI.h,Arduino Uno 只有一个 SPI 接口,即MOSI—D11,MISO—D12,SCK—D13,CS—D10,你可以使用任何 GPIO 作为 CS,不一定是 D10。
下面我们对 SPI 库部分重要的函数做简单讲解。
5.1 begin()
语法:
SPI.begin();
用于初始化 SPI。默认使用 SPI 模式 0,4MHz 时钟频率,拉高 CS,拉低 SCK 和 MOSI。
5.2 setsetClockDivider()
语法:
SPI.setClockDivider(divider);
用来配置 SPI 的时钟频率,可选参数有:
- SPI_CLOCK_DIV2
- SPI_CLOCK_DIV4(Default speed)
- SPI_CLOCK_DIV6
- SPI_CLOCK_DIV8
- SPI_CLOCK_DIV16
- SPI_CLOCK_DIV32
- SPI_CLOCK_DIV64
- SPI_CLOCK_DIV128
5.3 setBitOrder()
语法:
SPI.setBitOrder(order);
用来配置 SPI 的数据发送顺序,可选参数有:
- LSBFIRST
- MSBFIRST
5.4 setDataMode()
语法:
SPI.setDataMode(mode);
用来配置 SPI 的模式,可选参数有:
- SPI_MODE0
- SPI_MODE1
- SPI_MODE2
- SPI_MODE3
5.5 beginTransaction()
语法:
SPI.beginTransaction(mySettings);
用于配置更加详细的 SPI 参数,参数为SPISettings,建议不要同时使用SPI.beginTransaction(mySettings)和SPI.setClockDivider等,使用一个配置即可。
5.6 SPISettings
语法:
SPISettings mySettting(speedMaximum, dataOrder, dataMode);
参数 speedMaximum:用于设置 SPI 时钟频率,默认为 4MHz,一般这个参数要小于单片机的时钟频率,Uno 板可以达到 14MHz。
参数 dataOrder:用于设置传输数据时,是低位在前还是高位在前,默认是高位在前。可选值有MSBFIRST 和LSBFIRST。
参数 dataMode:用于设置 SPI 的通信模式,模式为前面介绍的 4 种模式,默认为模式 0。可选值有SPI_MODE0,SPI_MODE1,SPI_MODE2和SPI_MODE3。
一般设置为:
SPI.beginTransaction(SPISettings(14000000, MSBFIRST, SPI_MODE0));
5.7 endTransaction()
语法:
SPI.endTransaction();
放在SPI.beginTransaction(mySettings),用于结束 SPI 通信。
5.8 transfer(), transfer16()
语法:
uint8_t receivedVal = SPI.transfer(val);
uint16_t receivedVal16 = SPI.transfer16(val16);
SPI.transfer(buffer, size);
用于发送和接收数据。参数和返回值的数据类型可以是uint8_t 或者uint16_t,也可以发送一个数据类型为uint8_t 的数组。
下面是一个使用SPI.setClockDivider的示例代码:
#include <SPI.h>
#define CS 10
void setup() {
pinMode(CS, OUTPUT);
SPI.begin();
SPI.setClockDivider(SPI_CLOCK_DIV2);
// transfer data 128
digitalWrite(CS, LOW);
SPI.transfer(128);
digitalWrite(CS, HIGH);
}
void loop() {
}
下面是一个使用SPISettings的示例代码:
#include <SPI.h>
// using two incompatible SPI devices, A and B. Incompatible means that they
// need different SPI_MODE
const int slaveAPin = 20;
const int slaveBPin = 21;
uint8_t stat, val1, val2, result;
// set up the speed, data order and data mode
SPISettings settingsA(2000000, MSBFIRST, SPI_MODE1);
SPISettings settingsB(16000000, LSBFIRST, SPI_MODE3);
void setup() {
// set the Slave Select Pins as outputs:
pinMode(slaveAPin, OUTPUT);
pinMode(slaveBPin, OUTPUT);
// initialize SPI:
SPI.begin();
}
void loop() {
// read three bytes from device A
SPI.beginTransaction(settingsA);
digitalWrite(slaveAPin, LOW);
// reading only, so data sent does not matter
stat = SPI.transfer(0);
val1 = SPI.transfer(0);
val2 = SPI.transfer(0);
digitalWrite(slaveAPin, HIGH);
SPI.endTransaction();
// if stat is 1 or 2, send val1 or val2 else zero
if (stat == 1) {
result = val1;
} else if (stat == 2) {
result = val2;
} else {
result = 0;
}
// send result to device B
SPI.beginTransaction(settingsB);
digitalWrite(slaveBPin, LOW);
SPI.transfer(result);
digitalWrite(slaveBPin, HIGH);
SPI.endTransaction();
}
6. 适用于哪些设备
常见的使用 SPI 的设备有以下几个:
| SD Card Module | RFID Module | ST7735 TFT Display |
|---|---|---|
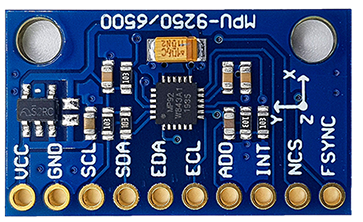 | 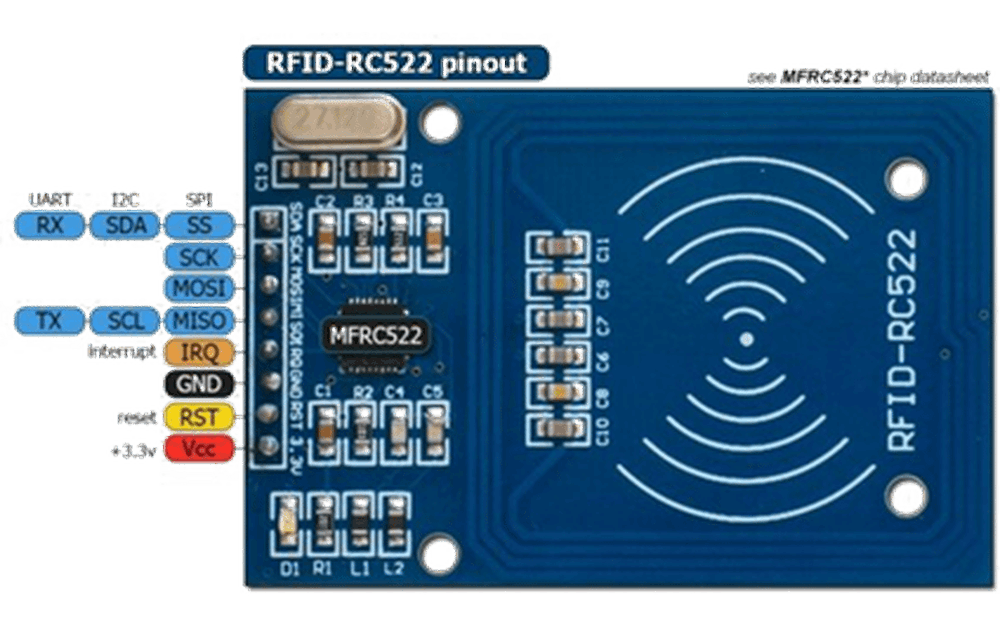 | 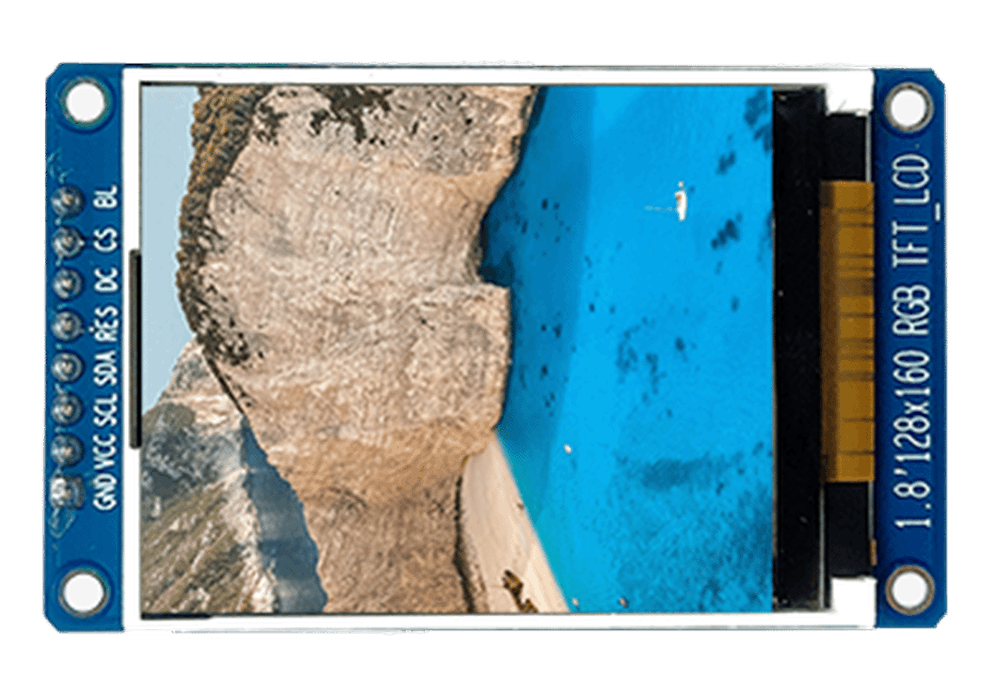 |
下一个章节我们将详细学习如何通过 SPI 向 MPU9250 读写数据。