初代门禁版本
虽然说我们目前使用的我制作的最新版本,前代也有很多问题,但是我还是认为有必要让大家了解一下,这样也能开阔大家的思维。
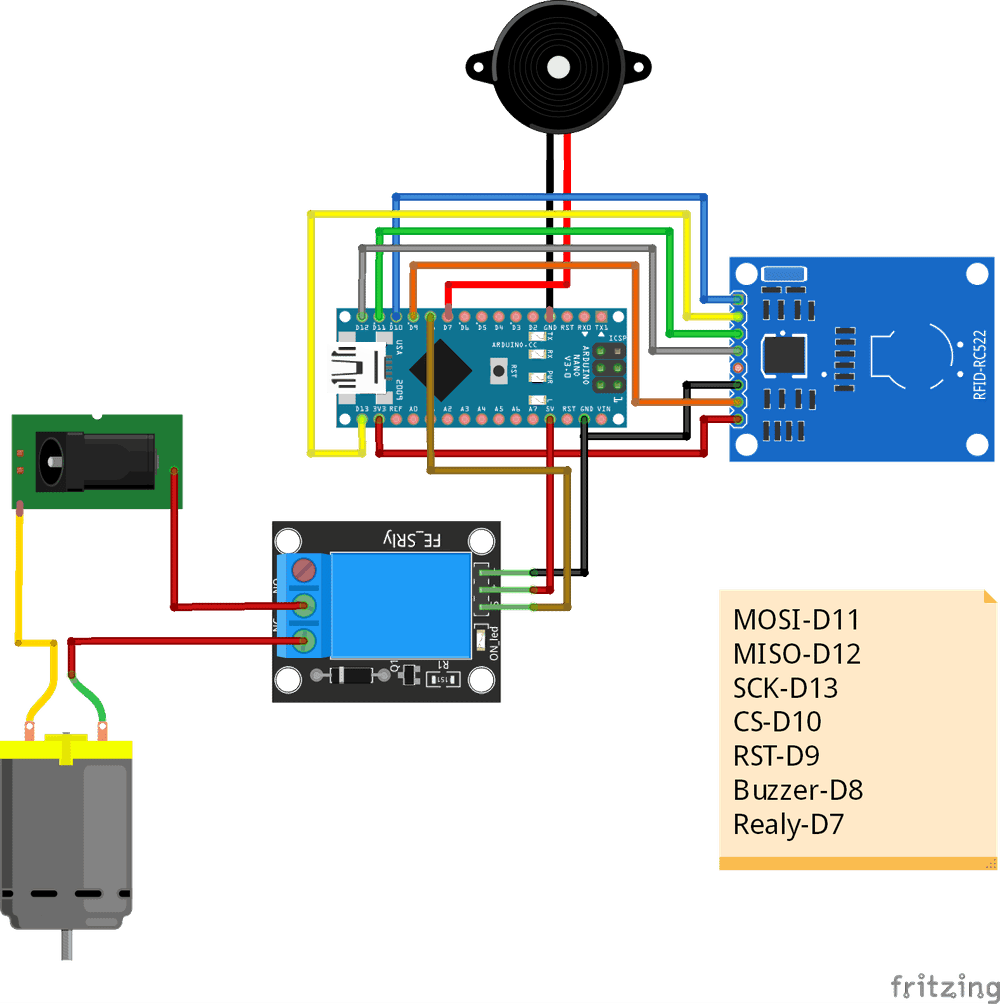
1. 一代版本——继电器版
继电器这个版本是大佬们的做法,可能也是比较专业的做法,但是可能是我学识浅薄,有些问题解决不了,所以就放弃了。大家自己也可以尝试一下。
继电器版的接线图如下:
我使用的示例代码如下:
#include <SPI.h>
#include <MFRC522.h>
const int SS_PIN = 10;
const int RST_PIN = 9;
const int Buzzer = 8;
const int Relay = 7;
const int UIDNUM = 50;
const String UID[UIDNUM] = {
"F1 41 01 5F", "01 5E 95 2B", "1A FD A5 21", "E1 D8 FC 5E", "E1 E0 00 5F",
"D1 7E FF 5E", "21 DE 01 5F", "D1 3A F6 5E", "31 AB FD 5E", "21 35 F7 5E",
"0A 57 80 1C", "FA 5D 70 7F", "D2 AA 1C 3E", "15 4F B9 E5", "75 89 B6 E5",
"0A 8C 36 B6", "00 69 0F 93", "75 89 B6 E5", "FA 50 35 B6", "EA B1 1C 3E",
"60 DB 0D 93", "5A 32 34 B6", "72 B1 85 44", "A3 A4 1B 3E", "0C 3C 1A 3F",
"72 B1 85 44", "50 DF D3 03", "A5 72 1B 3E", "A1 C2 53 74", "6C AE 73 17",
"0A 46 95 1C", "47 25 38 E1", "DC 53 14 3E", "80 54 0C 93", "2A 76 64 21",
"10 FD FC 2E", "19 F0 95 B4", "D7 FC 80 67", "60 B9 2A BE", "75 36 B5 E5",
"87 90 91 5E", "69 E9 1F C5", "C9 DE 3B B4", "08 71 21 DC", "9C B3 BC 3E",
"17 A4 91 5E", "F7 88 94 5E", "89 28 3A B4", "BC C3 87 43", "DC FB 0E 3F",
};
MFRC522 mfrc522(SS_PIN, RST_PIN);
void BuzzerRing(boolean Dur = false) {
for (uint8_t i = 0; i < 2; i++) {
tone(Buzzer, 300);
if (Dur)delay(200);
else delay(100);
noTone(Buzzer);
delay(100);
}
}
boolean GetKey(String CONTECTED_UID) {
for (uint8_t i = 0; i < UIDNUM; i++)
if (CONTECTED_UID == UID[i])return true;
return false;
}
void setup()
{
Serial.begin(115200);
SPI.begin();
mfrc522.PCD_Init();
pinMode(Relay, OUTPUT);
pinMode(Buzzer, OUTPUT);
BuzzerRing();
Serial.print("System Started!\nBuilt in UID Num:");
Serial.println(UIDNUM);
delay(3000);
}
void loop()
{
if ( ! mfrc522.PICC_IsNewCardPresent())return;
if ( ! mfrc522.PICC_ReadCardSerial())return;
String content = "";
Serial.print("UID(");
for (byte i = 0; i < mfrc522.uid.size; i++)
{
Serial.print(mfrc522.uid.uidByte[i] < 0x10 ? " 0" : " ");
Serial.print(mfrc522.uid.uidByte[i], HEX);
content.concat(String(mfrc522.uid.uidByte[i] < 0x10 ? " 0" : " "));
content.concat(String(mfrc522.uid.uidByte[i], HEX));
}
content.toUpperCase();
String CONTECTED_UID = content.substring(1);
if (GetKey(CONTECTED_UID)) {
Serial.println(" ):Access Accpeted!");
BuzzerRing();
digitalWrite(Relay, HIGH);
delay(1000);
digitalWrite(Relay, LOW);
}
else {
Serial.println(" ):Access Denied!");
BuzzerRing(true);
}
}
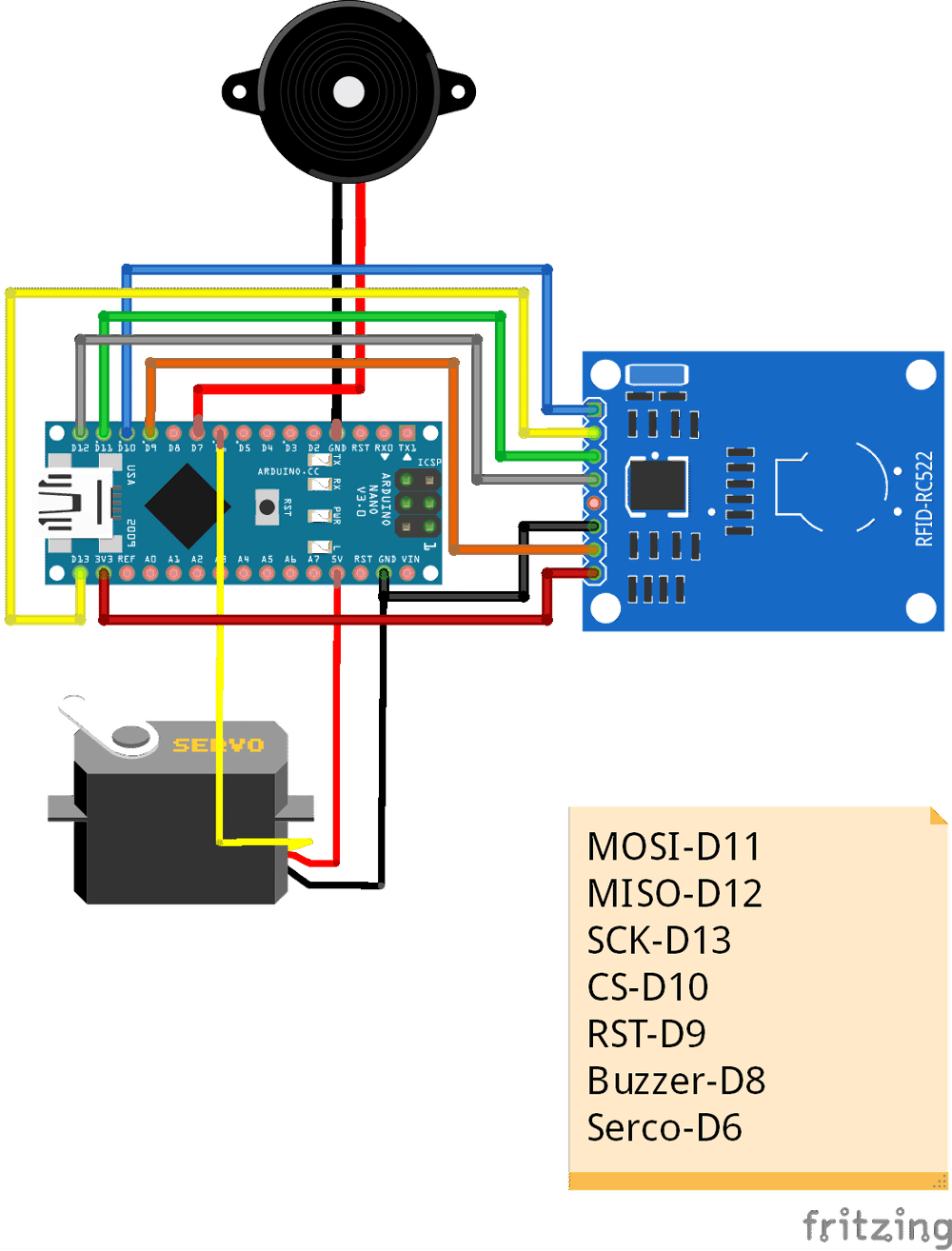
2. 二代版本——舵机版
舵机版和继电器版几乎一致,只是将继电器换成舵机罢了。
舵机版接线图如下:
我使用的示例代码如下:
#include <SPI.h>
#include <Servo.h>
#include <MFRC522.h>
const int SS_PIN = 10;
const int RST_PIN = 9;
const int Buzzer = 7;
const int UIDNUM = 50;
const String UID[UIDNUM] = {
"F1 41 01 5F", "01 5E 95 2B", "1A FD A5 21", "E1 D8 FC 5E", "E1 E0 00 5F",
"D1 7E FF 5E", "21 DE 01 5F", "D1 3A F6 5E", "31 AB FD 5E", "21 35 F7 5E",
"0A 57 80 1C", "FA 5D 70 7F", "D2 AA 1C 3E", "15 4F B9 E5", "75 89 B6 E5",
"0A 8C 36 B6", "00 69 0F 93", "75 89 B6 E5", "FA 50 35 B6", "EA B1 1C 3E",
"60 DB 0D 93", "5A 32 34 B6", "72 B1 85 44", "A3 A4 1B 3E", "0C 3C 1A 3F",
"72 B1 85 44", "50 DF D3 03", "A5 72 1B 3E", "A1 C2 53 74", "6C AE 73 17",
"0A 46 95 1C", "47 25 38 E1", "DC 53 14 3E", "80 54 0C 93", "2A 76 64 21",
"10 FD FC 2E", "19 F0 95 B4", "D7 FC 80 67", "60 B9 2A BE", "75 36 B5 E5",
"87 90 91 5E", "69 E9 1F C5", "C9 DE 3B B4", "08 71 21 DC", "9C B3 BC 3E",
"17 A4 91 5E", "F7 88 94 5E", "89 28 3A B4", "BC C3 87 43", "DC FB 0E 3F",
};
Servo myservo;
MFRC522 mfrc522(SS_PIN, RST_PIN);
void BuzzerRing(boolean Dur = false) {
for (uint8_t i = 0; i < 2; i++) {
tone(Buzzer, 300);
if (Dur)delay(200);
else delay(100);
noTone(Buzzer);
delay(100);
}
}
boolean GetKey(String CONTECTED_UID) {
for (uint8_t i = 0; i < UIDNUM; i++)
if (CONTECTED_UID == UID[i])return true;
return false;
}
void setup()
{
Serial.begin(115200);
SPI.begin();
mfrc522.PCD_Init();
myservo.attach(8);
myservo.write(40);
pinMode(Buzzer, OUTPUT);
BuzzerRing();
Serial.print("System Started!\nBuilt in UID Num:");
Serial.println(UIDNUM);
delay(3000);
}
void loop()
{
if ( ! mfrc522.PICC_IsNewCardPresent())return;
if ( ! mfrc522.PICC_ReadCardSerial())return;
String content = "";
Serial.print("UID(");
for (byte i = 0; i < mfrc522.uid.size; i++)
{
Serial.print(mfrc522.uid.uidByte[i] < 0x10 ? " 0" : " ");
Serial.print(mfrc522.uid.uidByte[i], HEX);
content.concat(String(mfrc522.uid.uidByte[i] < 0x10 ? " 0" : " "));
content.concat(String(mfrc522.uid.uidByte[i], HEX));
}
content.toUpperCase();
String CONTECTED_UID = content.substring(1);
if (GetKey(CONTECTED_UID)) {
Serial.println(" ):Access Accpeted!");
BuzzerRing();
for (int pos = 40; pos <= 60; pos += 1) {
myservo.write(pos);
delay(5);
}
delay(1000);
for (int pos = 60; pos >= 40; pos -= 1) {
myservo.write(pos);
delay(5);
}
}
else {
Serial.println(" ):Access Denied!");
BuzzerRing(true);
}
}
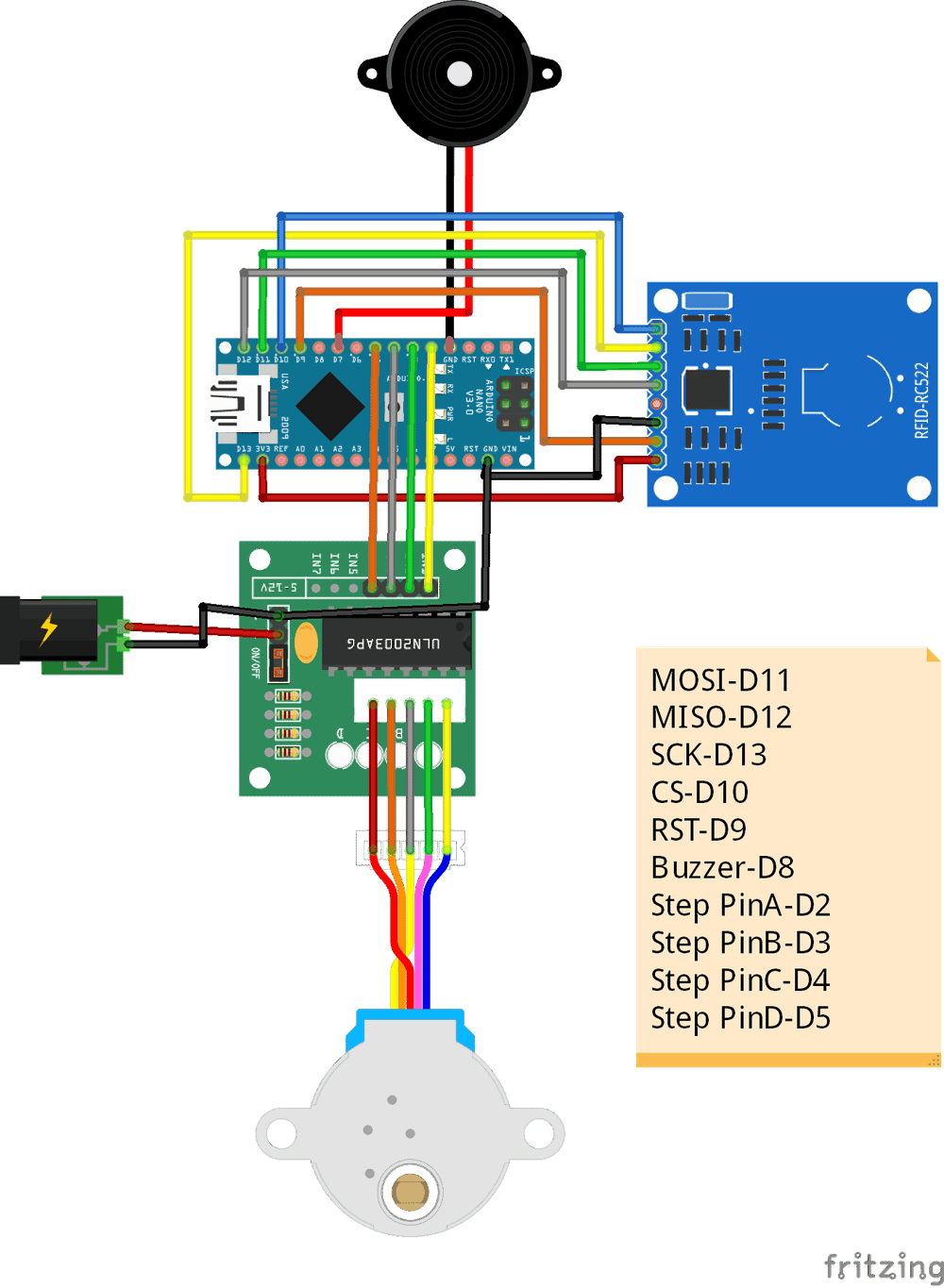
3. 三代版本——步进电机版
步进电机版和前面也是类似,只是将舵机换成步进电机,这里是使用 28BYJ-48 步进电机。
步进电机版接线图如下:
我使用的示例代码如下:
#include <SPI.h>
#include <MFRC522.h>
#include <AccelStepper.h>
const uint8_t PinA = 2;
const uint8_t PinB = 3;
const uint8_t PinC = 4;
const uint8_t PinD = 5;
const uint8_t Buzzer = 8;
const uint8_t RST_PIN = 9;
const uint8_t SS_PIN = 10;
const uint16_t stepsPerRevolution = 400;
const uint8_t UIDNUM = 37;
const String UID[UIDNUM] = {
"F1 41 01 5F", "01 5E 95 2B", "1A FD A5 21", "E1 D8 FC 5E", "E1 E0 00 5F",
"D1 7E FF 5E", "21 DE 01 5F", "D1 3A F6 5E", "31 AB FD 5E", "21 35 F7 5E",
"0A 57 80 1C", "FA 5D 70 7F", "D2 AA 1C 3E", "15 4F B9 E5", "75 89 B6 E5",
"0A 8C 36 B6", "00 69 0F 93", "75 89 B6 E5", "FA 50 35 B6", "EA B1 1C 3E",
"60 DB 0D 93", "5A 32 34 B6", "72 B1 85 44", "A3 A4 1B 3E", "0C 3C 1A 3F",
"72 B1 85 44", "50 DF D3 03", "A5 72 1B 3E", "A1 C2 53 74", "6C AE 73 17",
"0A 46 95 1C", "47 25 38 E1", "DC 53 14 3E", "80 54 0C 93", "2A 76 64 21",
"DC FB 0E 3F", "5A 20 4C 2D",
};
MFRC522 mfrc522(SS_PIN, RST_PIN);
AccelStepper stepper(8, PinA, PinC, PinB, PinD);
void BuzzerRing(boolean Dur = false) {
for (uint8_t i = 0; i < 2; i++) {
digitalWrite(Buzzer, HIGH);
if (Dur)delay(200);
else delay(100);
digitalWrite(Buzzer, LOW);
delay(100);
}
}
boolean GetKey(String CONTECTED_UID) {
for (uint8_t i = 0; i < UIDNUM; i++)
if (CONTECTED_UID == UID[i])return true;
return false;
}
void setup()
{
SPI.begin();
Serial.begin(115200);
mfrc522.PCD_Init();
stepper.setMaxSpeed(500.0);
stepper.setAcceleration(1000.0);
stepper.runToNewPosition(0);
pinMode(Buzzer, OUTPUT);
BuzzerRing();
Serial.print("System Started!\nBuilt in UID Num:");
Serial.println(UIDNUM);
delay(3000);
}
void loop()
{
if ( ! mfrc522.PICC_IsNewCardPresent())return;
if ( ! mfrc522.PICC_ReadCardSerial())return;
String content = "";
Serial.print("UID(");
for (byte i = 0; i < mfrc522.uid.size; i++) {
Serial.print(mfrc522.uid.uidByte[i] < 0x10 ? " 0" : " ");
Serial.print(mfrc522.uid.uidByte[i], HEX);
content.concat(String(mfrc522.uid.uidByte[i] < 0x10 ? " 0" : " "));
content.concat(String(mfrc522.uid.uidByte[i], HEX));
}
content.toUpperCase();
String CONTECTED_UID = content.substring(1);
if (GetKey(CONTECTED_UID)) {
Serial.println(" ):Access Accpeted!");
BuzzerRing();
stepper.runToNewPosition(stepsPerRevolution);
delay(1000);
stepper.runToNewPosition(0);
}
else {
Serial.println(" ):Access Denied!");
BuzzerRing(true);
}
delay(3000);
}